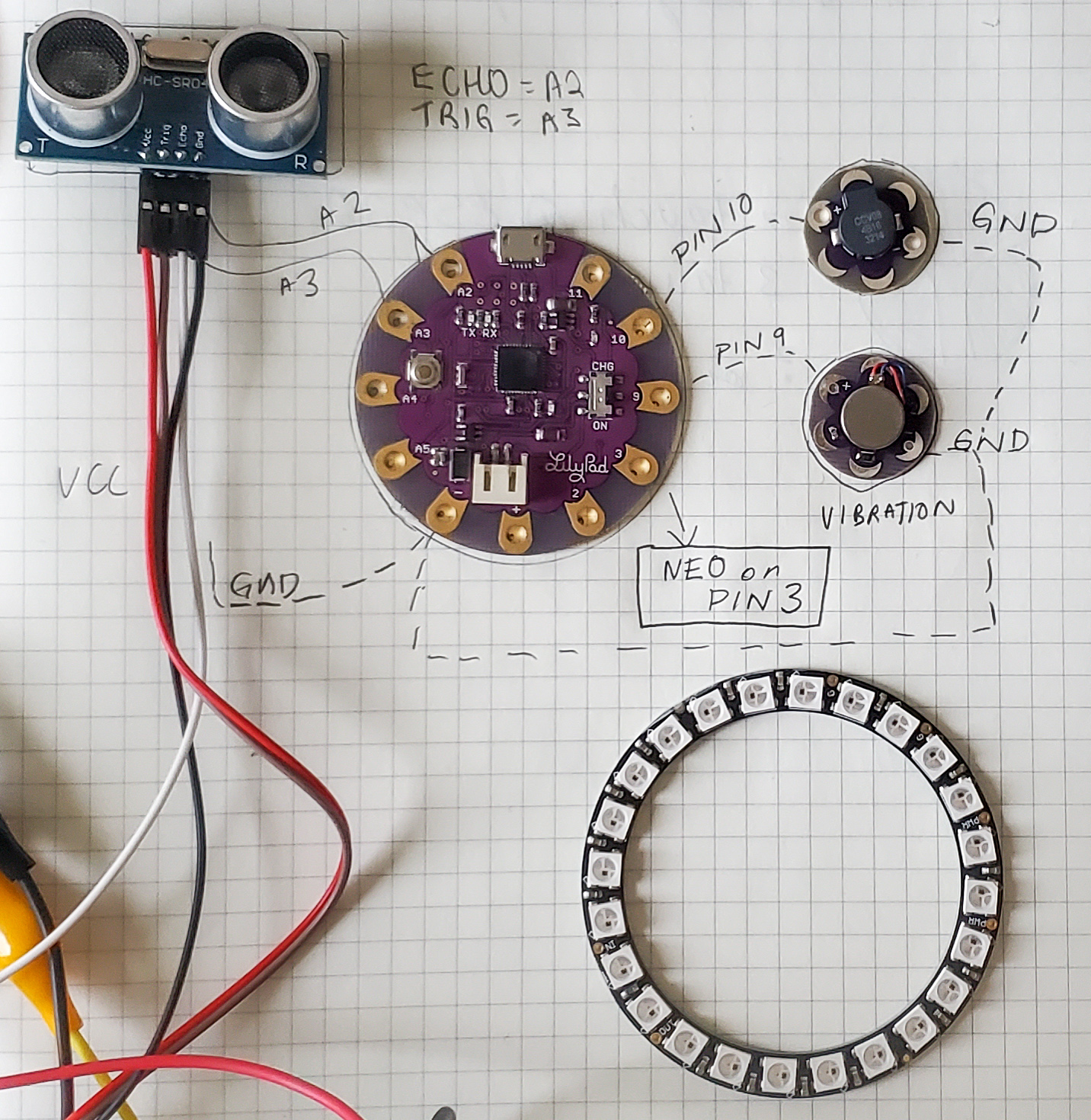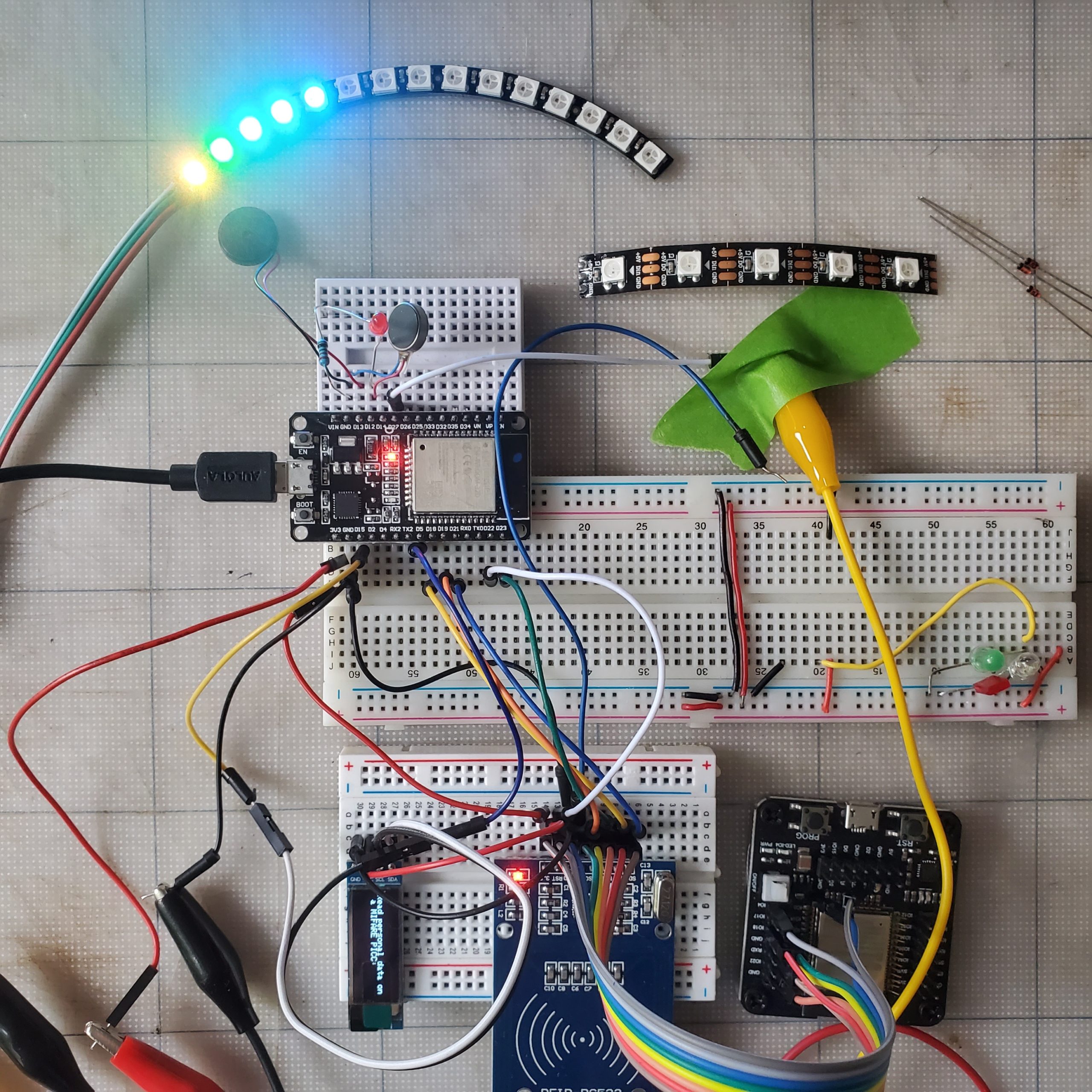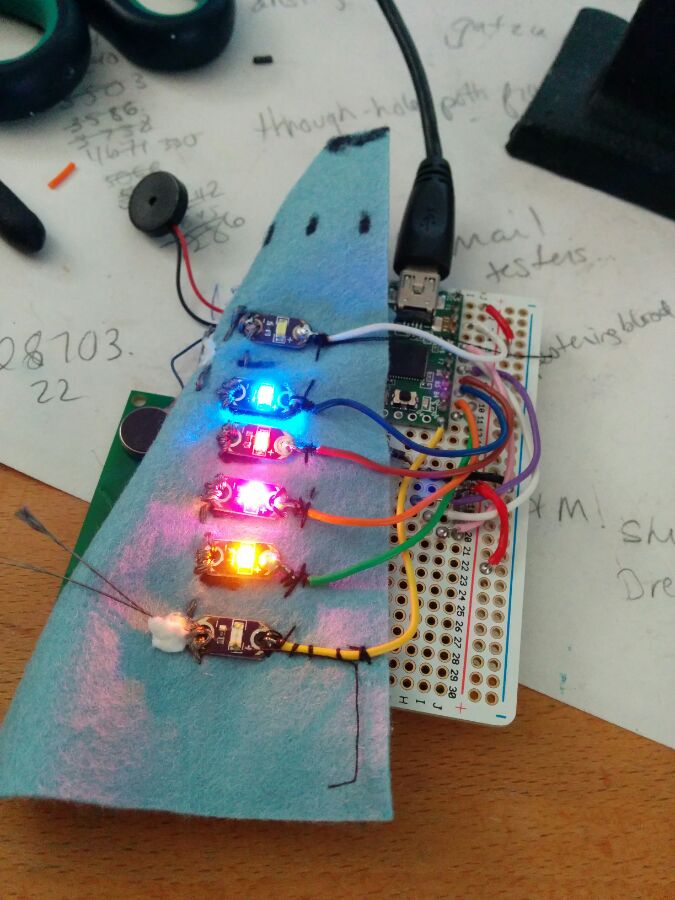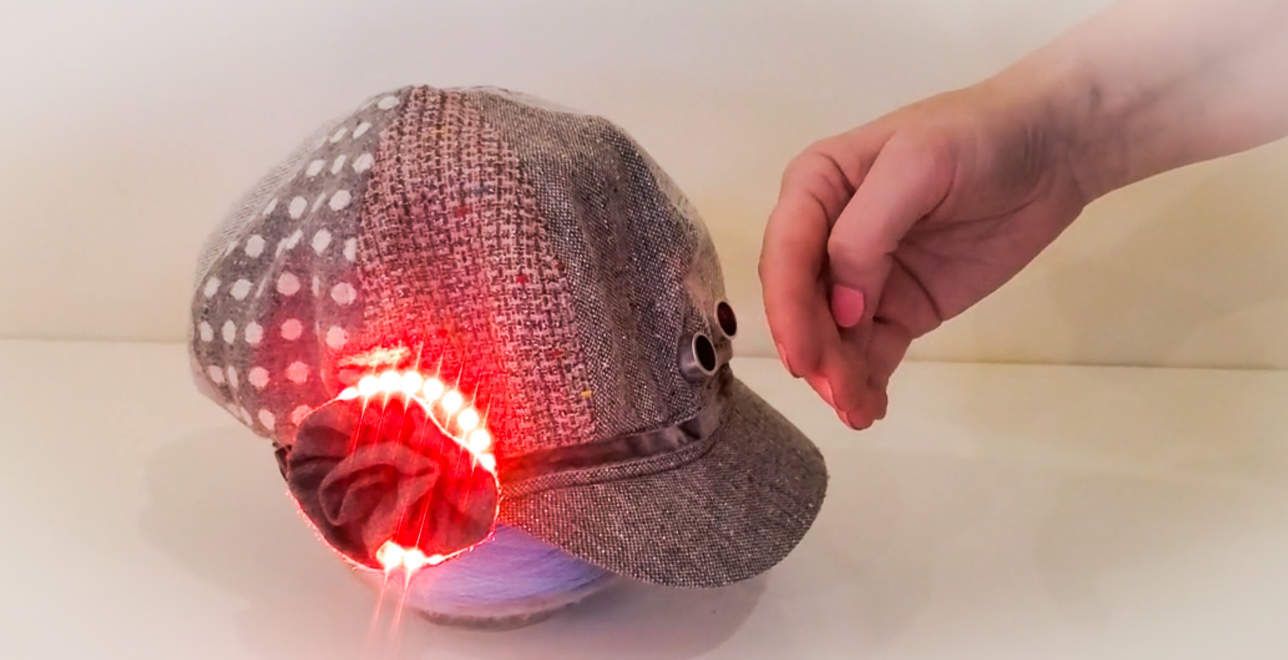
In this tutorial, for a distance sensor hat, I’ll be using an ultrasonic sensor to measure the distance of others approaching. This will trigger a neopixel ring with colours, a buzzer for sound, and a vibration sensor to get some haptic feedback.
This tutorial has moved to Instructables: https://www.instructables.com/A-Hat-for-Keeping-Physical-Distance-NeoPixels-and-/
Thanks!